Microscale synthetic devices (or “microswimmers”) that offer precise, tunable, autonomous motion at microscales have the potential to revolutionize bioengineering and healthcare by providing direct access to complex, difficult-to-access regions of human body through on-board imaging and wireless data transmission to enable localized medical interventions. Controlled, tunable motion at microscales can also unlock a plethora of applications in active matter, soft robotics, sensing, bioengineering, etc.
A fundamental requirement to realize these advanced functionalities is to identify biocompatible strategies for precise, controllable navigation at microscales. Recently, we have collaborated with Prof. Daniel Ahmed and Prof. Thomas Mallouk to demonstrate several promising modalities for microscale propulsion that leverage external energy sources such as acoustic/magnetic fields. These microswimmers leverage the interaction of an acoustic field with either sharp-edges or microbubbles to achieve propulsion. Additionally, magnetic field can be utilized to achieve controlled steering capabilities.
References:
- C. Dillinger, J. Knipper, N. Nama, and D. Ahmed, Steerable acoustically powered starfish-inspired microrobot, Nanoscale, accepted, 2023.
- C. Dillinger, N. Nama, and D. Ahmed, Ultrasound-activated ciliary bands for microrobotic systems, Nature Communications, Vol. 12, pp. 6455, 2021.
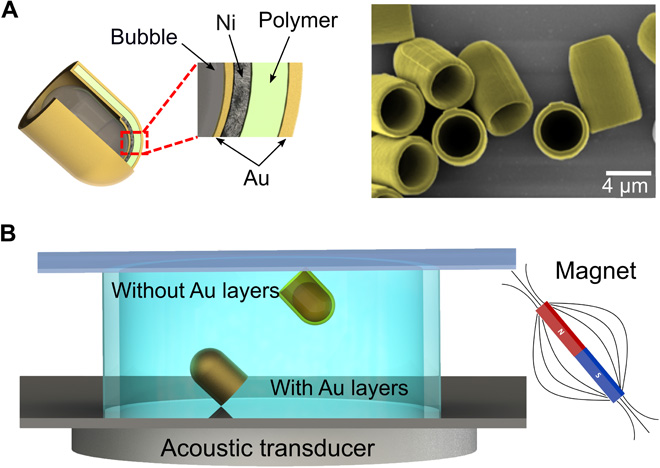
- J. M. McNeill, N. Nama, J. Braxton, and T. E. Mallouk, Wafer-Scale fabrication of micro- to nanoscale bubble swimmers and their fast autonomous propulsion by ultrasound, ACS Nano, Vol. 14(6), pp. 7520–7528, 2020.
- L. Ren, N. Nama, J. M. McNeill, F. Soto, Z. Yan, W. Liu, W. Wang, J. Wang, and T. E. Mallouk, 3D Steerable, acoustically powered microswimmers for single-particle manipulation, Science Advances, Vol. 5(10), pp. eaax3084, 2019.